前言
大恒相机是Robofuture战队在ROBOMASTER2021赛季所使用的摄像头,在这里进行记录软件安装过程,并对使用进行说明。
安装
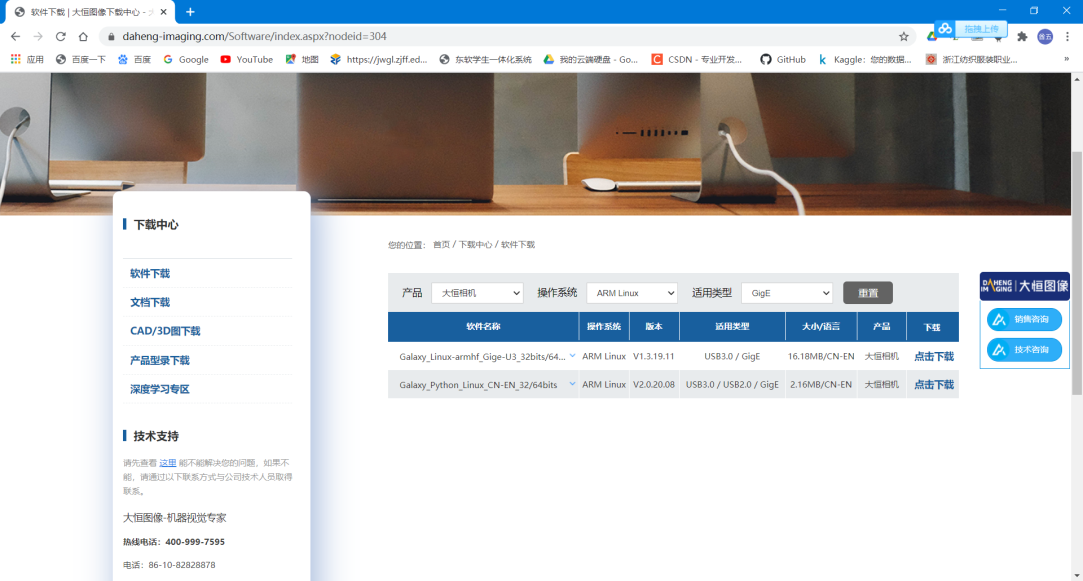
1.获取软件
软件可以在大恒官网获取:传送门 下载下图两个软件至jetson nano,并解压
2.安装相机驱动
•步骤1:在文件夹Galaxy_Linux-armhf_Gige-U3_32bits-64bits_1.3.1911.9271中打开终端
• 步骤2:执行:./Galaxy_camera.run ;(按提示输入Y,中间有一次问你安装中文或英文,其他则输入Y即可);
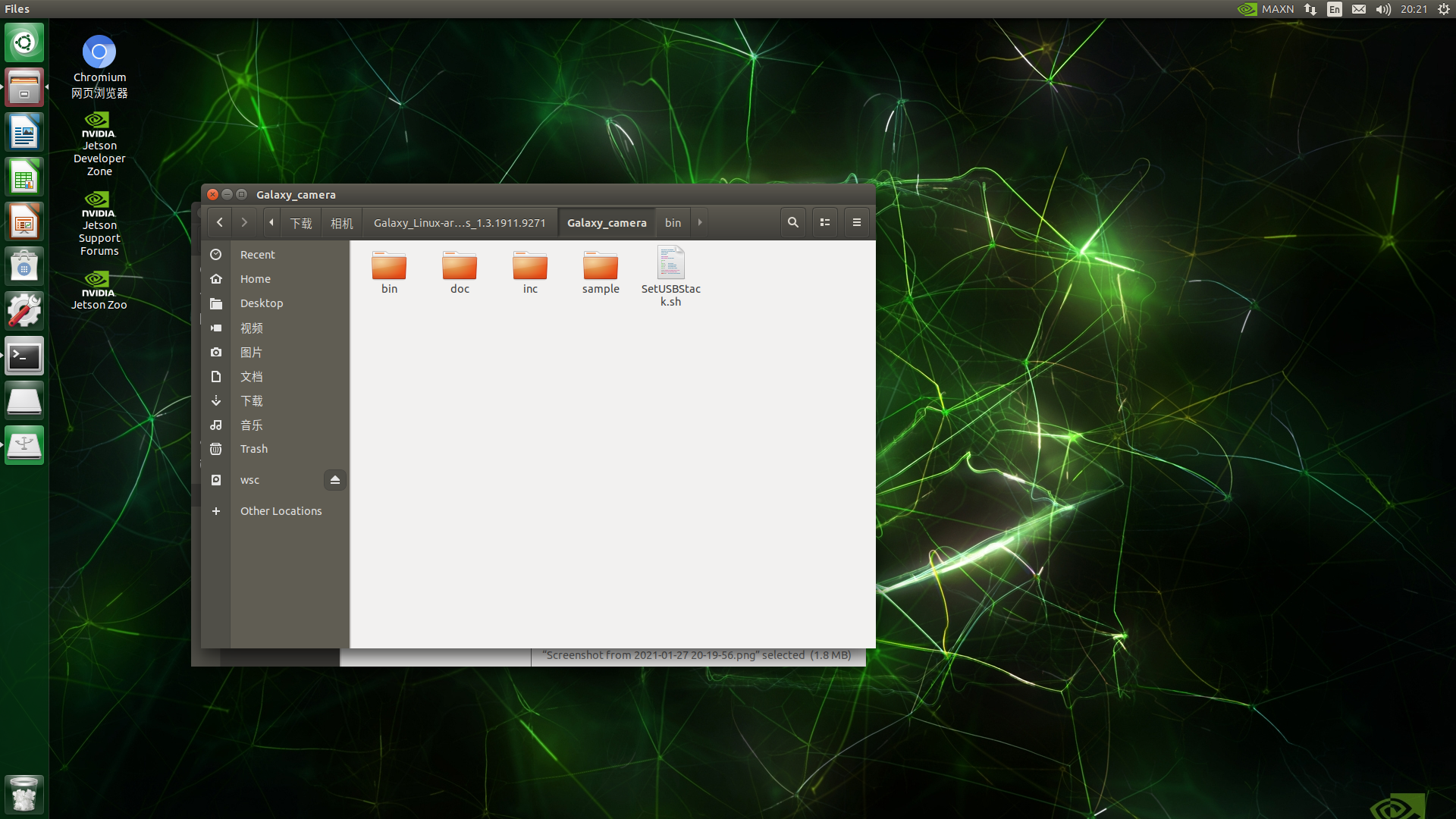
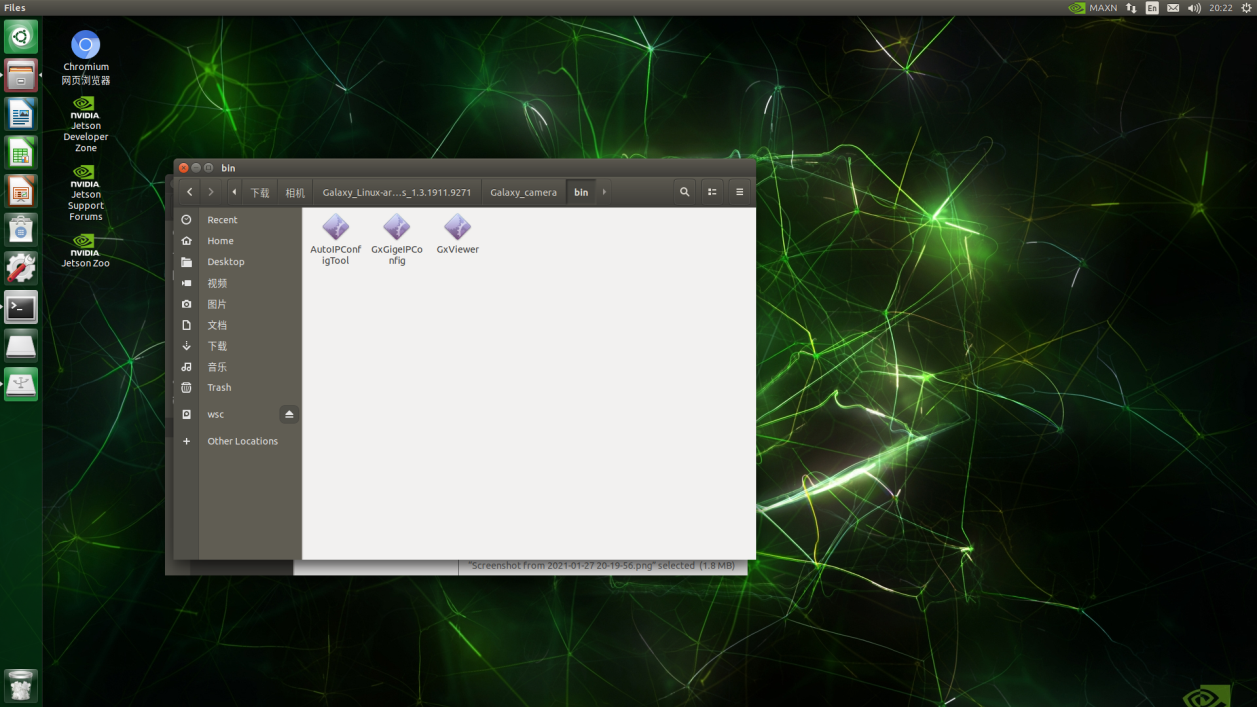
安装完成则产生以下文件:
3.安装相机gxipy库
步骤1:
• 在Galaxy_Linux_Python_2.0.2008.9111文件夹中打开终端,或通过路径跳转至该目录下
步骤2:
sudo apt-get install python3.x
步骤3:
sudo apt-get install python3.x-dev
步骤4:
sudo apt-get install python3-setuptools
步骤5:
cd ./api
步骤6:
python3 setup.py build
步骤7:
sudo python3 setup.py install
(若在python中执行import gxipy未报错则安装成功)
步骤8:
sudo apt-get install python3-pip
步骤9:
sudo pip3 install numpy==1.9.0
步骤10:
sudo pip3 install pillow
(若失败则执行后再试:sudo apt-get install libjpeg8 libjpeg62-dev libfreetype6 libfreetype6-dev)
使用
步骤1:导入必要库
import gxipy as gx
from PIL import Image
import numpy
import cv2
步骤2:枚举设备。
# dev_info_list 是设备信息列表,列表的元素个数为枚举到的设备个数,列表元素是字典,其中包含设备索引(index)、ip 信息(ip)等设备信息
device_manager = gx.DeviceManager()
dev_num, dev_info_list = device_manager.update_device_list()
if dev_num == 0:
sys.exit(1)
步骤3:打开设备
# 获取设备基本信息列表
strSN = dev_info_list[0].get("sn")
# 通过序列号打开设备
cam = device_manager.open_device_by_sn(strSN)
步骤4:开始采集
cam.stream_on()
# 获取流通道个数
# 如果 int_channel_num == 1,设备只有一个流通道,列表 data_stream 元素个数为 1
# 如果 int_channel_num > 1,设备有多个流通道,列表 data_stream 元素个数大于 1
# 目前千兆网相机、USB3.0、USB2.0 相机均不支持多流通道。
int_channel_num = cam.get_stream_channel_num()
# 获取数据
# num 为采集图片次数
num = 10
for i in range(num):
# 从第 0 个流通道获取一幅图像
raw_image = cam.data_stream[0].get_image()
# 从彩色原始图像获取 RGB 图像
rgb_image = raw_image.convert("RGB")
if rgb_image is None:
continue
# 从 RGB 图像数据创建 numpy 数组
numpy_image = rgb_image.get_numpy_array()
if numpy_image is None:
continue
# 显示并保存获得的 RGB 图片
image = Image.fromarray(numpy_image, 'RGB')
image.show()
image.save(str(i)+"image.jpg")
步骤5:停止采集,关闭设备
cam.stream_off()
cam.close_device()
补充说明
以下函数应在图像采集开始前调用
#set exposure 设置曝光时间
cam.ExposureTime.set(500)
#set gain 设置增益
cam.Gain.set(0)
#set width/height 设置宽/高
cam.Width.set(500)
cam.Height.set(500)
#set White balance 根据通道设置白平衡系数
• 0是红通道
• 1是绿通道
• 2是蓝通道
cam.BalanceRatioSelector.set(0)
• 设置值
cam.BalanceRatio.set(2.2)
cam.BalanceRatioSelector.set(1)
cam.BalanceRatio.set(1)
cam.BalanceRatioSelector.set(2)
cam.BalanceRatio.set(2.2)
# 保存参数组
• User Set Selector
cam.UserSetSelector.set(1)
• User Set Save
cam.UserSetSave.send_command()
• 自定义白平衡的自定义函数:
• 可用该函数替换掉“frame = cv2.cvtColor(frame,cv2.COLOR_BGR2RGB) ”
def whiteBalance(img):
r,g,b = cv2.split(img)
r_avg = cv2.mean(r)[0]
g_avg = cv2.mean(g)[0]
b_avg = cv2.mean(b)[0]
k = (r_avg + g_avg + b_avg)/3
kr = k / r_avg
kg = k / g_avg
kb = k / b_avg
r = cv2.addWeighted(src1 = r,alpha = kr,src2 = 0,beta = 0, gamma = 0)
g = cv2.addWeighted(src1 = g,alpha = kg,src2 = 0,beta = 0, gamma = 0)
b = cv2.addWeighted(src1 = b,alpha = kb,src2 = 0,beta = 0, gamma = 0)
balance_img = cv2.merge([b,g,r])
return balance_img